
Walser Pistenraupen Modellbau
Von Wiking gibt es ein wunderschön detailliertes Modell einer Schmidt Zwei-Stufen-Schneeschleuder in 1:32, welche vom Maßstab exakt zu meinem JC PistenBully 400 passt.
Auf eine Anregung von Klaus Bergdolt, der bereits eine solche Schneeschleuder erfolgreich motorisiert hatte, schaffte ich mir zwei dieser Teile an, um eine funktionsfähige Doppel-Schneeschleuder zu bauen.

Zunächst muss die Schneeschleuder zerlegt werden, und hier leistet die Trommelwelle besonderen Widerstand. Die Endscheiben sind aufgepresst, und die Schleudertrommeln sind auf einer Riffelung fixiert. Ich habe die Welle an einem Ende vorsichtig aufgebohrt, und dann die Welle auf der Ständerbohrmaschine soweit auspresst, bis eine Trommel entnommen werden konnte. Die restlichen Teile ließen sich dann relativ leicht entfernen.


Ausbohren der Welle an einer Endscheibe
Welle mit Riffelung für die Trommeln
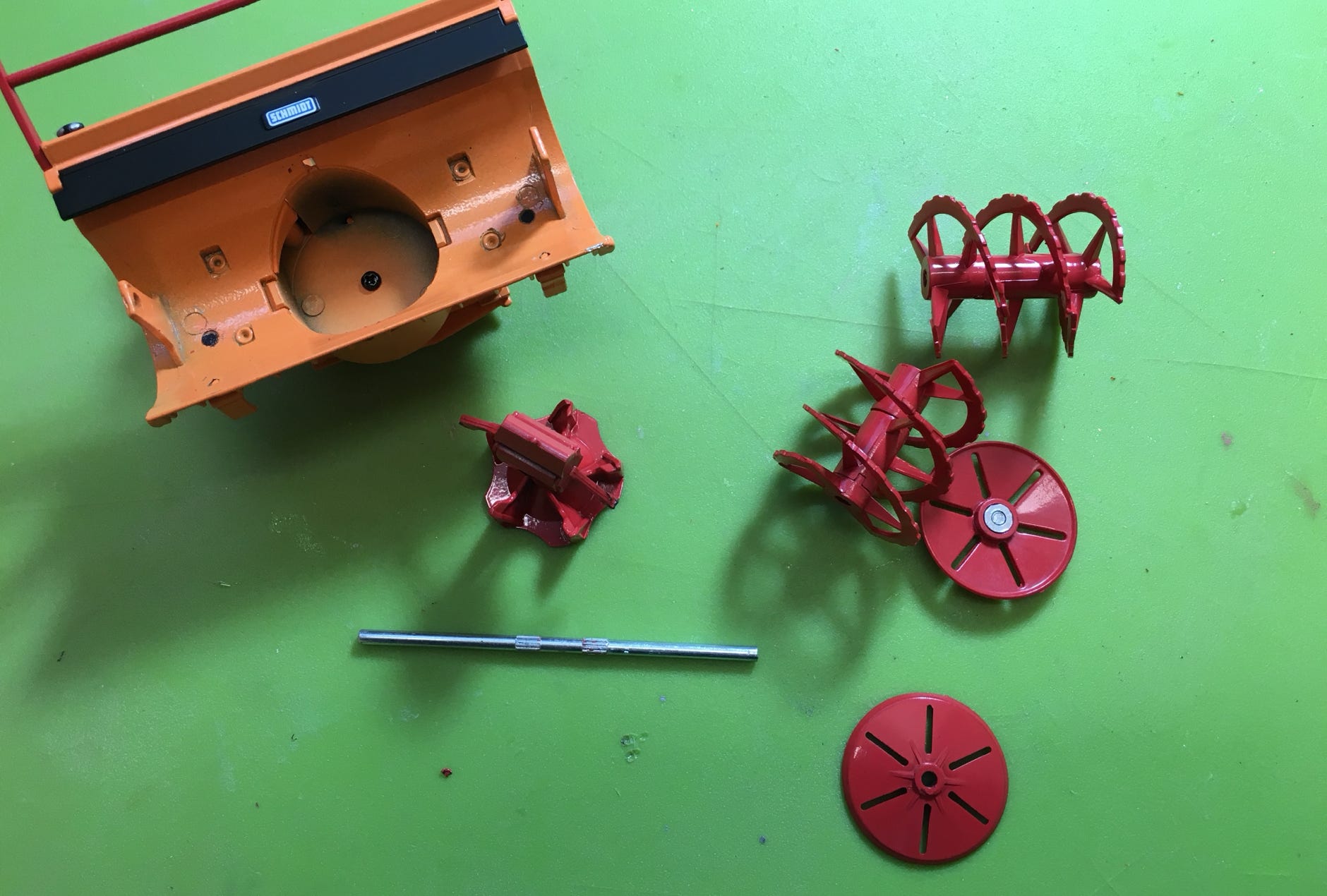
Einzelteile der Schneeschleuder
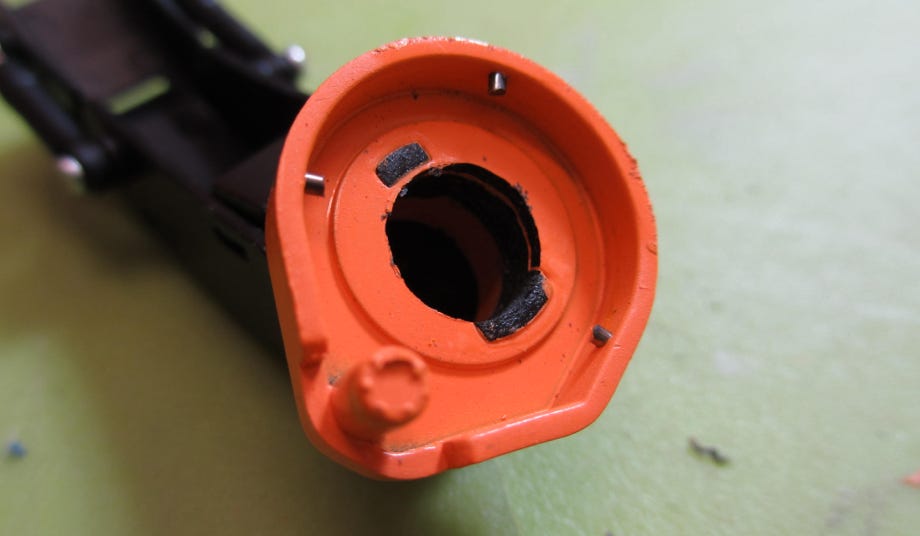
Nachdem ich nun die Einzelteile in Händen hatte, ging es an das Aufbohren. Glücklicherweise sind alle zu bearbeitenden Teile aus Kunststoff, somit gehen diese Arbeitsschritte relativ leicht vonstatten. Der Kamin ist komplett zu und muss natürlich geöffnet werden, damit später der Schnee hier nach außen geschleudert werden kann.

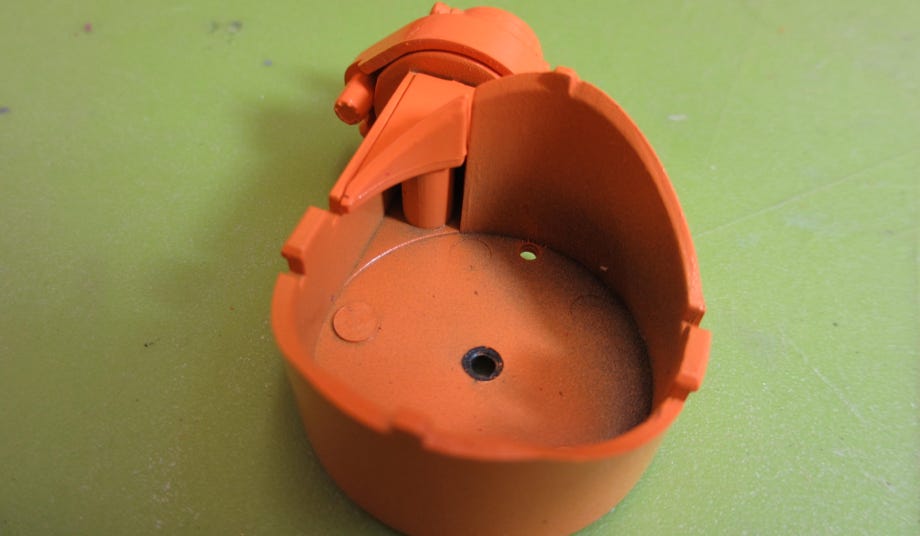
Kaminauslass von oben
Schleuderradgehäuse und Kamin


Schleuderradmotorgehäuse
Schleuderrad von hinten
Dazu spannte ich die Teile in einem Schraubstock ein und bohrte sie vorsichtig aus. Den Rest höhlte ich mit dem Proxxon Micromot Tool und Schlüsselfeilen aus. Die Rückwand vom Schleudergehäuse muss glatt sein, dazu sind 1-2 Zapfen abzuschleifen, siehe Bild unten:

Schleuderradgehäuse mit ausgehöltem Kamin und dem ausgehölten Motorgehäuse
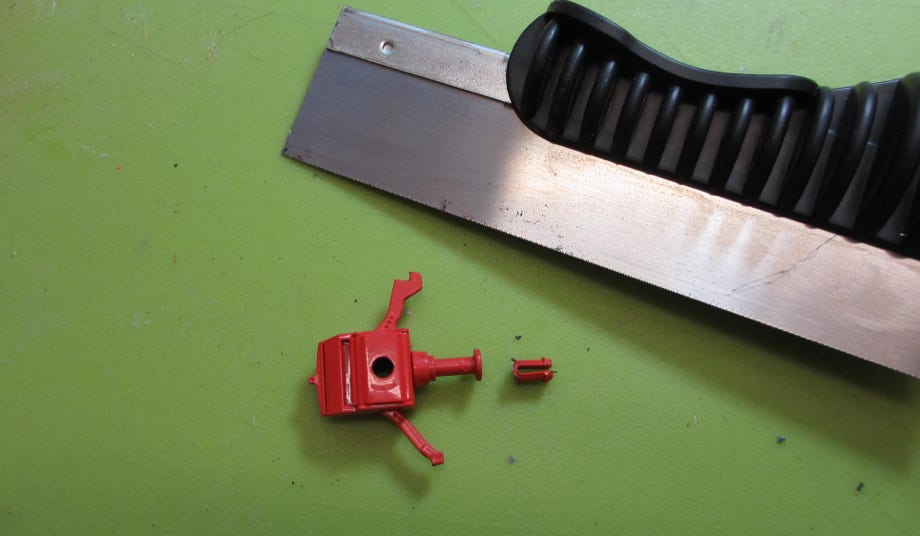
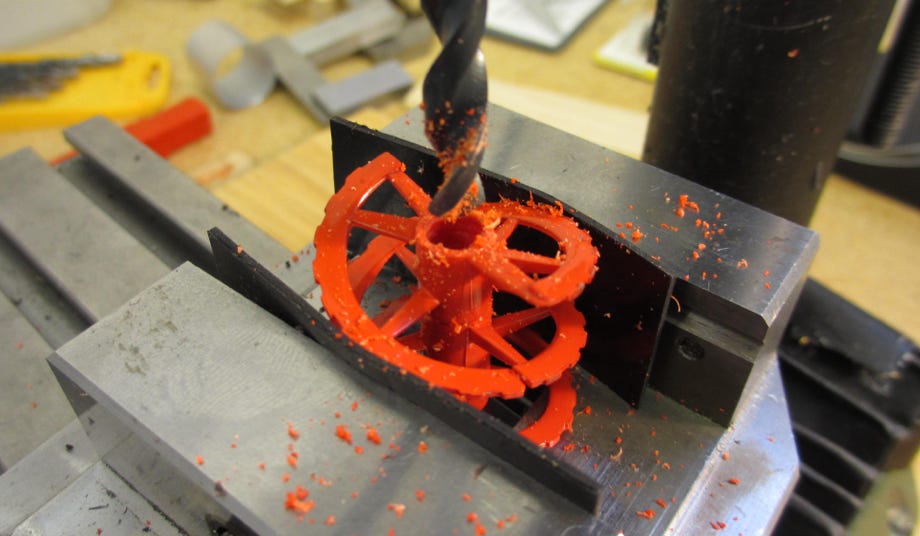
Beim Schleuderrad entfernte ich den Mittelzapfen mit einem 45°-Senker (siehe Bild unten links), um Platz für den Antriebsmotor zu schaffen. Deshalb musste auch der Montagezapfen für das Schleuderrad abgesägt werden (siehe Bild unten rechts).
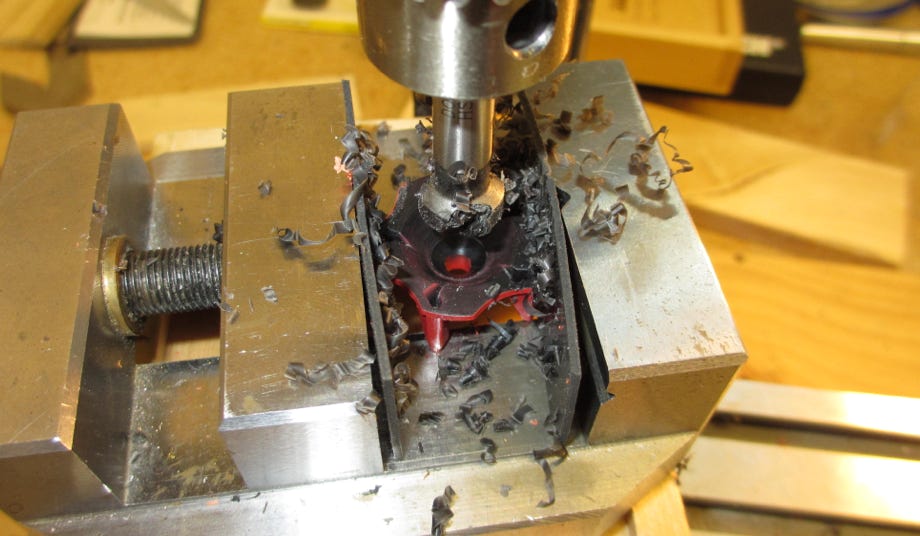
Ausbohren des Schleuderrades mit einem 45°-Senker
Absägen des Zapfens am Trommelumlenkgetriebe
Zum Schluss bohrte ich die Schälschnecken aus, um Platz für die Antriebsmotoren zu schaffen. Dies ist der schwierigste Teil, und deshalb ging ich entsprechend sorgfältig ans Werk. Die Trommel habe ich im Schraubstock mit Gummilappen vorsichtig soweit eingespannt, dass sie nicht mehr von Hand verdreht werden kann. Dann bohrte ich in mehreren Schritten, zuerst mit einem 4 mm Bohrer, dann 5 mm, und mit niedriger Drehzahl sehr langsam die Welle aus. Den Abschluss bildete ein 6,5 mm Bohrer, damit gerade genug Spiel für den Getriebemotor mit 6 mm Durchmesser besteht. Dabei fällt meistens das oberste Segment ab, welches aber mit Superkleber schnell wieder befestigt werden kann. Die losen Kontaktstellen der Schälschnecke habe ich ebenfalls mit Superkleber fixiert, und dafür natürlich vorher mit einem Messer den Lack entfernt.
Nachdem ich die Kamine hohlgebohrt hatte, fiel der ursprüngliche Befestigungszapfen weg. Ich wollte sie aber auf jeden Fall drehbar haben, deshalb fiel die naheliegende Lösung flach, sie einfach in einer fixen Position zu verkleben. Nach etwas Überlegen habe ich dann kurze Stücke aus 1 mm Stahldraht unten in den Drehkranz vom Kamin geklebt (siehe Foto unten rechts).
Vorsichtiges Ausbohren der Schälschnecke
Stahldrahtstifte im Kamin-Drehkranz
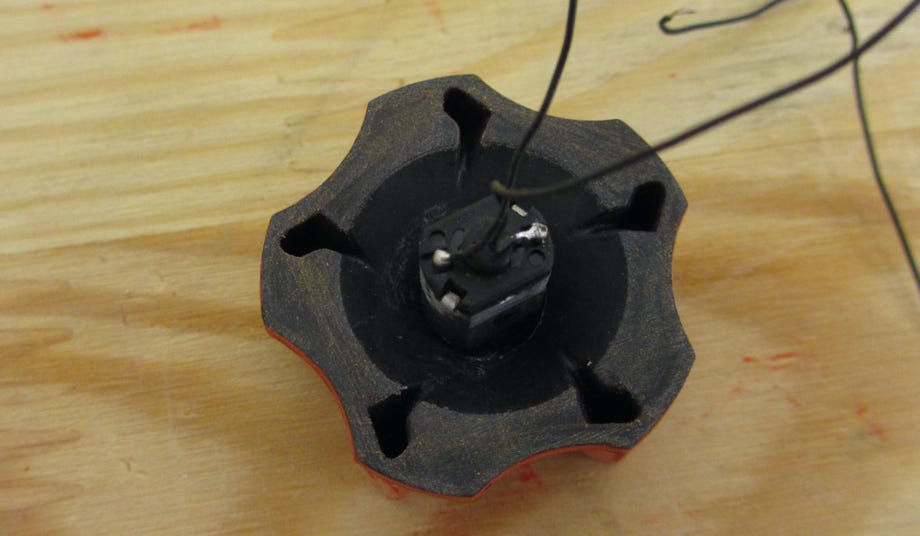
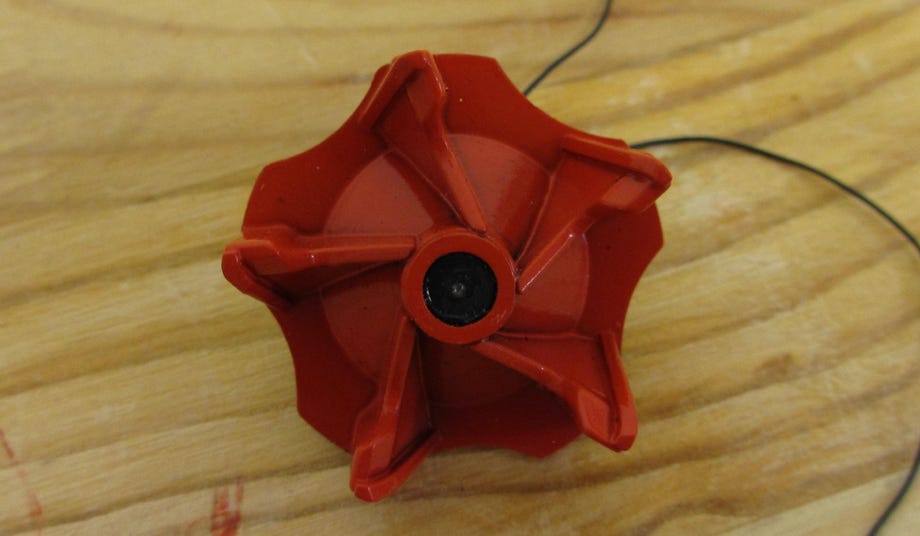
Für den Antrieb der Schälschnecken besorgte ich diese Motor-Getriebeeinheit, und diesen Micro-Motor für das Schleuderrad. Das Umlenkgetriebe für die Schälschnecken habe ich sorgfältig auf den Außendurchmesser des Getriebemotors mit 6 mm aufgebohrt. Für das Schleuderrad drehte ich eine passende Nabe aus Kunststoff mit einer 1 mm Bohrung für die Motorwelle. Die Nabe wurde mit Superkleber in das Schleuderrad geklebt, und anschließend wurde ebenfalls mit Superkleber die Motorwelle in die Bohrung geklebt.
Antriebsmotor für das Schleuderrad
Schleuderrad-Nabe


Einkleben des Schleuderrad-Motors
Eingeklebter Schleuderrad-Motor
In das Schleuderrad-Gehäuse habe ich eine passende Ausnehmung für den Motor gefräst, und diesen dann sorgfältig ausgerichtet, sodass sich das Schleuderrad absolut freigängig drehen kann. Für das Verkleben mit Epoxy-Kleber habe ich ihn mit Zahnstochern in Position gehalten (siehe Bilder oben).
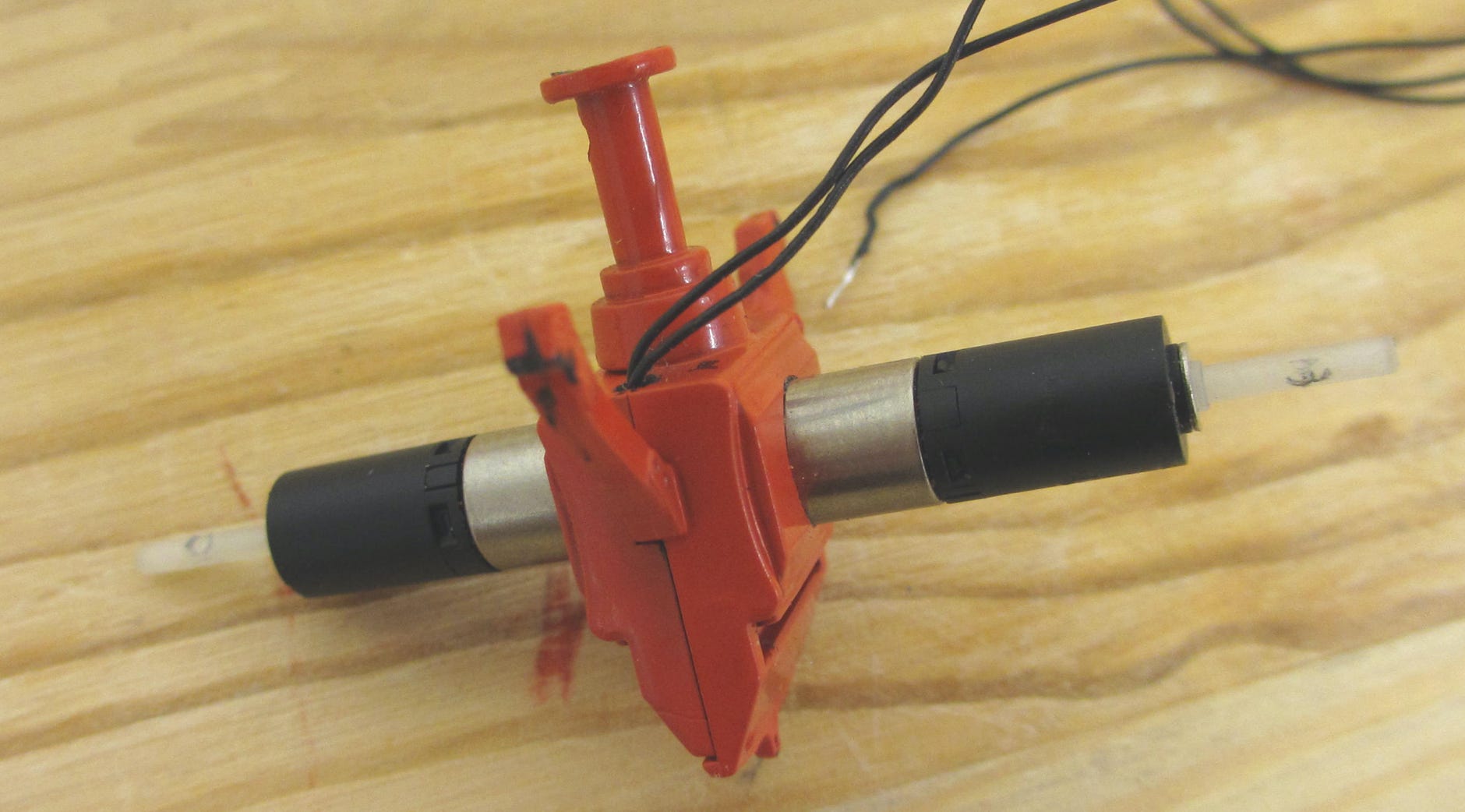
Micro-Getriebemotoren als Antrieb für die Schälschnecken
Das Verlöten der Kabel für den Trommelantriebe entpuppte sich als ziemliche Fummlerei, die verlöteten Kabelenden verstaute ich in entgegengesetzen Hohlräumen des Gehäuses, damit sie nicht in Kontakt kommen können. Die Getriebemotoren habe ich mit Superkleber in die Bohrungen geklebt.
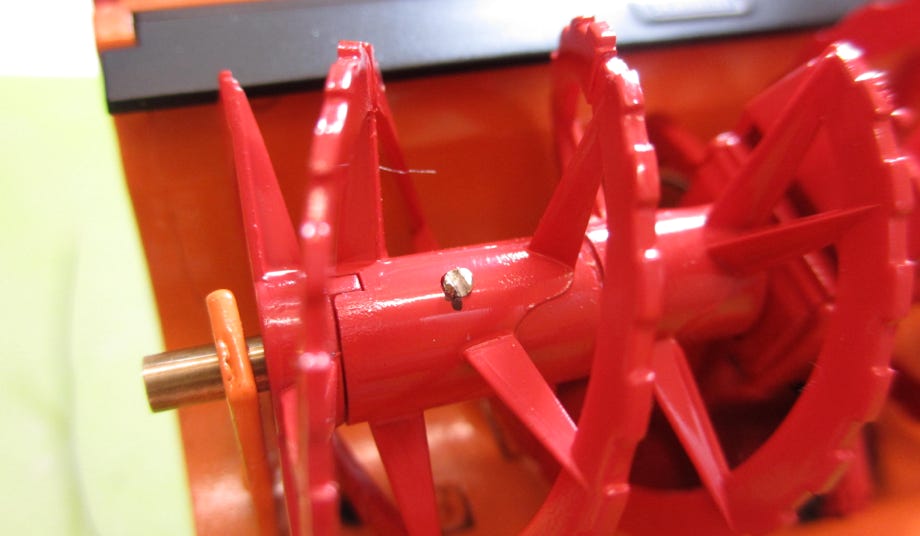
Für den Antrieb der Schälschnecken habe ich Wellenstücke aus 3 mm Messingdraht auf der Drehbank hergestellt, mit einer 1,5 mm Bohrung für die Motornabe. Da die Frästrommeln unterschiedlich breit sind, ergeben sich die Längen der Wellenstücke zu links 21,5 mm und rechts 18,5 mm. Als Mitnehmer dient eine Madenschraube, die ich aus M1,6 Schrauben kurzerhand selbst hergestellt habe.
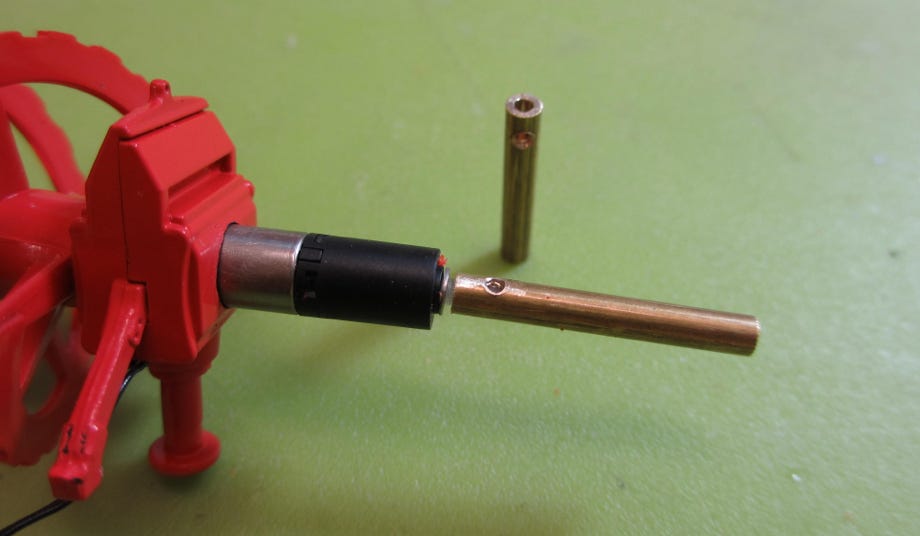
Wellenstücke für die Schälschnecke
M1,6 Madenschraube als Mitnehmer
Das Räumschild ist abnehmbar, es ist mit einer sehr schwer zugänglichen Schraube befestigt. Nach Ausmessen der Aufnahmezapfen habe ich auf meiner Stepcraft CNC-Fräse eine Halterung aus schwarzem Kunststoff gefräst. Die beiden Schleudern habe ich mit einem Messing-Vierkantrohr verbunden, dazu habe ich M2 Gewinde in die Schleuderhalterungen geschnitten. Dieses Messingrohr habe ich an die Halterung geklebt und dann über M2-Schrauben mit dem Geräteträger verbunden.
Ein PDF mit der bemaßten Zeichnung der Halterung kann hier heruntergeladen werden.

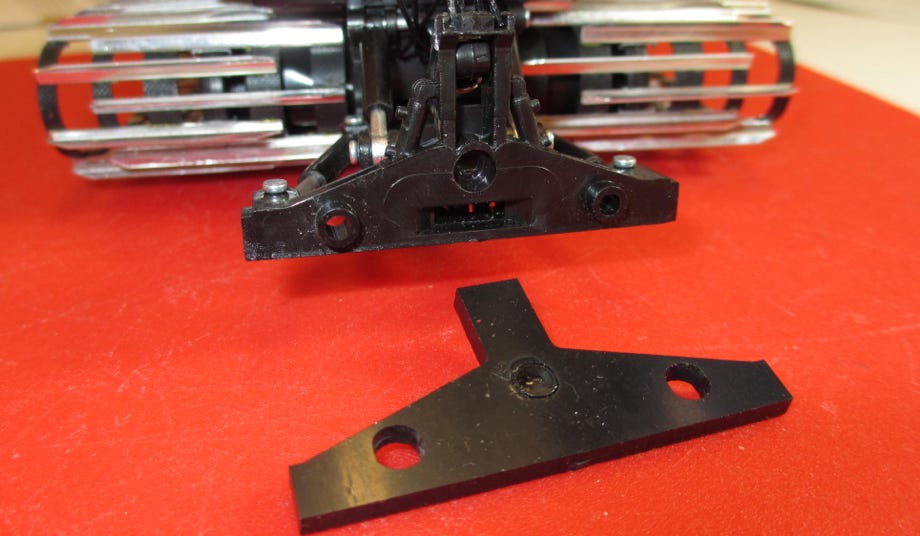
JC PB400 Schildträger
CNC-gefräste Halterung für die Schleuder

Verbinden der beiden Schleudern mit einem Messing-Vierkantrohr
Montage der Doppel-Schleuder am Geräteträger des JC PB400
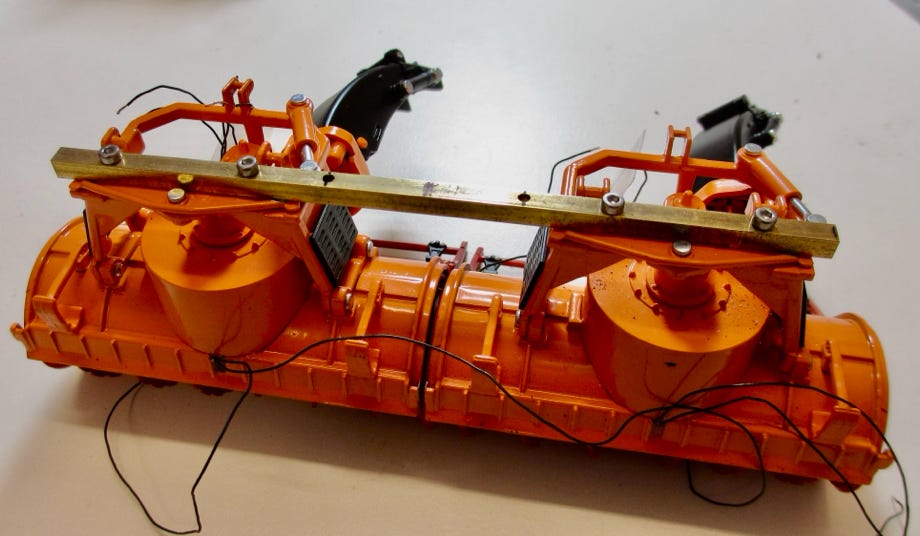
Aus Messing-Vierkantrohren habe ich einen Rahmen gebaut, mit dem die Fräse am Geräteträger montiert wird. Die Litzen wurden an der Unterseite verlegt und verklebt. Die Verbindung zur Raupe erfolgt über einen Stecker.

Montagerahmen für die Doppelschneeschleuder am Geräteträger
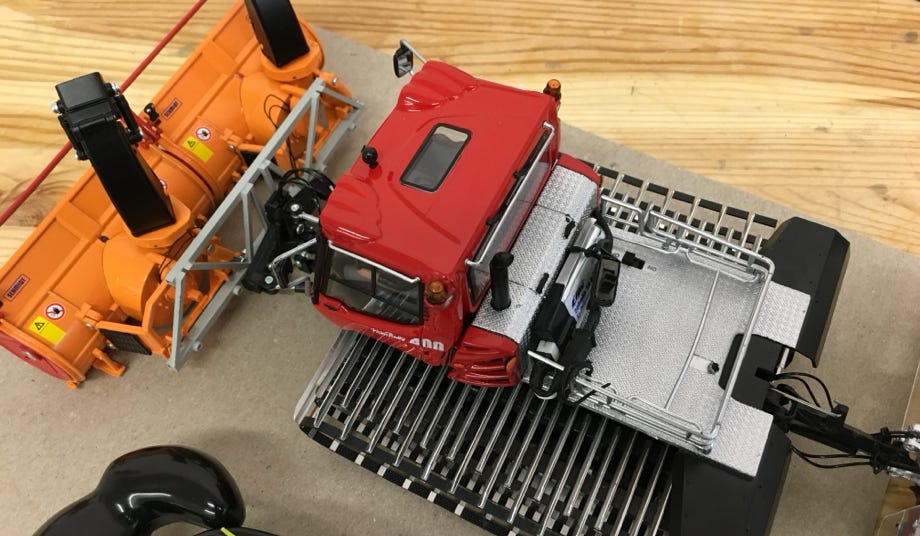
Den ursprünglichen Plan, die Schleuder über den Fahrakku zu versorgen, habe ich aufgegeben. Sie wird nun über einen separaten LiPo 1S Akku versorgt, den ich der Einfachheit halber mit einem Mikroschalter auf der Ladefläche untergebracht habe (siehe Foto rechts).
Das ist zwar optisch nicht die perfekte Lösung, aber für die Testläufe reicht es vorerst aus.

Die Schneeschleuder in ihrem Element. Ein Testlauf war zu dem Zeitpunkt noch nicht möglich.
Die ersten Tests im Schnee, ein leichter feinkörniger Pulver bei -6°C, waren eher ernüchternd. Die Wurfradgehäuse verstopfen sehr schnell, und die Drehzahl der Motoren sinkt deutlich. Der rechte Wurfradmotor blockierte sehr rasch, und ist deshalb im Video bereits nicht mehr aktiv. Die Schneeschleuder an sich funktioniert, wie man am ausgeworfenen Schnee erkennen kann. Nachdem die Raupe mit der JC-Fernsteuerung nur sehr schwer langsam geradeaus bewegt werden kann, habe ich sie für den Test händisch bewegt. Als nächster Schritt sind stärkere Wurfradmotoren geplant und den JC PB400 mit einer besseren Fernsteuerung auszustatten.
Im Fachmagazin Truckmodell 3/2016 ist ein 6-seitiger Artikel von Klaus Bergdolt und mir über den Umbau der Schneeschleuder erschienen, wie üblich mit vielen Tipps zum Bau und zur Detaillierung.
Der Artikel ist als PDF-Dateien zum Herunterladen verfügbar (mit freundlicher Genehmigung des Verlags), einfach auf das Bild klicken.




Copyright © 2011-2026 Walser Pistenraupenmodellbau
Diese Seite verwendet Cookies. Sie stimmen der Verwendung von Cookies durch Anklicken von “OK” zu. Nähere Informationen finden Sie in unseren Datenschutzbestimmungen.
This page is using Cookies. You are permitting the use of cookies by clicking on “OK”. More information can be found at our Privacy Protection.

